視網膜,並不像大多數人認為那樣,只是一個和攝影機差不多的簡單的感光傳感器。它可像大腦一樣做運算,是我們視覺系統信息處理的第一階段。視網膜有很多重要的功能來幫助我們及時感知外部世界,其中最有趣的是視網膜的預期動力學,它使我們能夠預測或“看到”未來事件。學理上,我們可以通過它簡單的神經網路,來了解視網膜的這種預期能力。但由於我們對神經編碼缺乏了解,預期動力學的機制至今還很不清楚。如果能深入了解視網膜的預期動力學,這不僅對開發人工視網膜非常有用,而且對神經科學的基礎至關重要。
前言
我們大多數人,在高中學習眼睛結構時,都以攝影機作為一個類比。但是,這個類比是否準確呢?在這篇短文中,我們將看到眼睛比攝影機更為聰明 (註1)。在眼睛和攝影機中,都有一個透鏡將外部世界影像投射到一個感光基底上。在攝影機中,這個基底是一片電荷耦合元件(charge coupled device, CCD),如圖一a;而在我們眼睛中,它是一片視網膜。 CCD是一種具有數百萬感光像素的二維半導體器件,可檢測並儲存落在其身上的光強度,從而可以生成隨時間變化的圖像(電影)。在視網膜中,它也有數以百萬計的光敏細胞,用來檢測入射光之強度以產生光電流,然後再以其內部的神經網路,將光電流轉化成為動作電位,一般稱作突波(spike),如圖一b,然後再把這些突波,通過視覺神經,送到我們大腦的視覺皮層進行進一步處理。
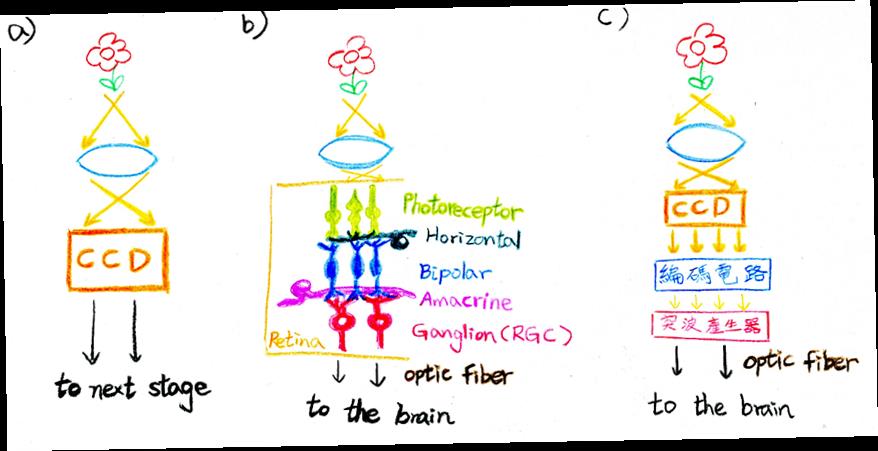
(圖一 )攝影機,眼睛和人工視網膜比較:
(a) 攝影機的透鏡把外部影像投射到CCD上,CCD是感光元件,可紀錄影像然後影像轉換成的電信號傳到下一級作處理。
(b)在眼睛中,光信號是由感光細胞等所組成的視網膜網路,感知和處理,最後以RGC產生動作電位經視神經傳到大腦。
(c)人工視網膜就是以感光元件、編碼電路和突波産生器來取代視網膜的功能。
眼睛和攝像機的主要區別在於,視網膜是一種能夠進行信息處理的主動器件,而CCD則只是一種被動的圖像檢測和儲存器。CCD只會被動地將其像素上的光強度信息送到下一級電路,以進行進一步的信息處理。然而,視網膜本身即可主動的處理大量的信息,以便提供及時有用的資訊給大腦,儘管其基本機制仍然沒有十分清楚。例如,視網膜神經節細胞的動態範圍(神經細胞在某個時間內可以產生的突波數量)非常小(典型值為10的數量級),但我們可以很輕鬆的,在同一個視野內,分辨非常大的光強對比(106的數量級)。這就是為什麼,我們可以沒有任何困難地,即使足球由豔陽照射的場地中,飛到觀眾座位區陰影區域內(約是106數量級的亮度變化),仍清楚的看到足球的位置。然而,對於攝影機來講,CCD像素的動態範圍為103的量級,即使透過改變攝影機的光圈和CCD的自動增益也很難辦到這點。因此,足球比賽現場直播的導演都需要經常以不同攝影機取景,避免足球畫面太亮或太暗。而最近對於攝像機和電視機發展出稱為HDR(高動態範圍(註3))的特殊技術,可以改善這個功能,但效果仍不及視網膜。
視網膜是一個智能網絡
那麼,我們的眼睛是怎麼能夠做到電子工業花了多年時間發展出來的HDR技術?答案是在於由視網膜內細胞所形成的神經網路。視網膜大致上是由以下部分所組成(註1):a)視錐和視桿作為輸入檢測器; b)神經元(水平,雙極和無長突細胞)作為計算層之網路和c)神經節 (RGC) 作為輸出層。眾所周知,神經網路能進行信息處理。最近,深度學習網路,常常是報紙上的新聞,其中包括圍棋、自動駕駛,以及社交媒體等。所有這些報告中的共通點,都是這些網路的智能特性。因此,視網膜可看為一種智能器件,應該不會感到意外。
一般相信,視網膜可以自行調整以適應所輸入之視覺信息,並且可以從這種視覺信息中只提取重要信息。例如,上述大對比度的視覺圖像之感知能力,可視為視網膜的自動增益控制。這種自動增益控制,是視網膜對光強的自然適應。除了對光強的自然適應,更有趣的是,動物視覺系統中有涉及時間與空間的適應性,此適應性與視網膜的預期動力學相關。動力學這個物理專有名詞,在這𥚃指的是視網膜受到光刺激後,其所作出隨時間反應之現象。由於神經系統中的信號傳導、信息處理和運動驅動總是需要時間因而產生延遲,如果動物無法以預測的方法來彌補這些延遲,那麼動物就難以捕捉獵物或避免捕食者之攻擊。相反,動物如能“看到”移動物體的未來位置,用以追踪獵物或避免被捕食,這對動物的存活將是很重要的。
閃光滯後效應:預測移動物體之未來位置
有一個著名的例子能証明,我們有預測移動物體未來位置的能力。它被稱為閃光滯後效應(註4),在這種效應中,我們會一直認為移動物體位於其當前物理位置的前面。圖二顯示了閃光和滯後效應實驗示意圖。在圖二中,有一個物體以圓形軌道移動,每當物體到達某個點時,物體旁邊就會出現閃光,如圖二a所示。如把這個過程製作成動畫,閃光和移動物體總是會出現在電影的同一幀中。要是我們是一幀一幀的看這個動畫,我們不難發現這點。可是,當動畫以正常速度播放時,大多數人會説,閃光出現時,該物體已通過閃光點,此結果顯示他們所看到的是移動物體的未來位置。最初,這個閃光滯後效應被設計為心理物理學實驗,我們並不清楚這個效應到底發生在視覺訊息通路的哪一部分,可能在大腦、視覺皮層,也可能在視網膜。在1999年,Berry等人(註5),藉由多電極陣列(MEA)量測蠑螈視網膜的訊號,證明了這種預測移動物體的現象可發生在視網膜上。其所使用的MEA可以測量視網膜上不同位置上的神經活動,在實驗設計上,他們也可同時知道刺激照射的位置,從而得知視網膜反應與刺激運動物體間的關係。實驗結果清楚表明,一個孤立的視網膜,不單可以辨別運動的方向,並且會把最大神經活動之位置(物體感知位置)移向運動方向之前方,證實視網膜的神經網路,能夠預測運動物體未來的位置。
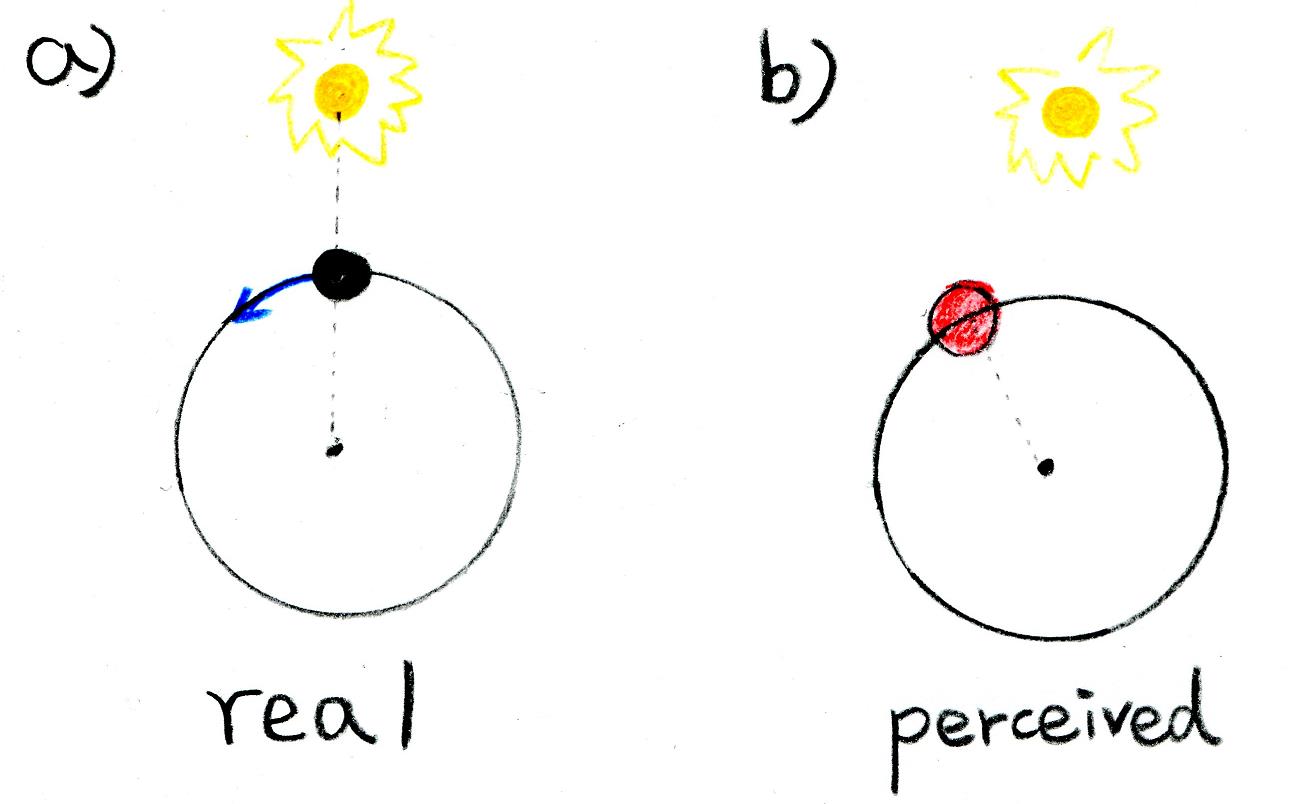
(圖二)閃光延遲效應:一物體正在作圓週運動,在它通個某處時,在它身傍處會有閃光出現。
(a) 閃光出現時,物體的物理位置。
(b) 一般人在閃光出現時所感知物體的位置。
時間之預測
在上個例子中,運動物體的位置和時間是相關的。儘管預期是一個時間概念,但它在上述例子中,表現為空間之移動,即未來位置等價於未來時間。然而,視網膜還有另一種預期性動力學,只涉及時間,完全和空間無關,稱為遺缺刺激反應(OSR(註6))或韻律記憶。在該實驗中,整個視網膜會被光脈衝週期性地刺激。在這情況下,大家會預期,神經節細胞將以刺激週期相同的週期作出反應。事實亦的確如此。然而,當週期性的外部刺激突然停止時,有趣的事發生了,視網膜居然在刺激停止後,還會作出反應,而其反應時間則與先前刺激之週期相關。換句話說,視網膜根據先前刺激的周期,預測未來的刺激;當週期性刺激應該出現而未出現時作出反應,因此被命名為遺缺刺激反應。就好像我們正跟着伴奏之節拍唱歌,當伴奏突然停止時,我們還是可以有能力以先前伴奏之節拍繼續唱歌。請注意,OSR的性質與上述移動物體實驗的性質大不相同。在OSR中,沒有空間的變化信息。視網膜必須從刺激之歷史或記憶中創建預期的反應。最近,我們實驗室已經將這種時間預測的研究從周期性刺激擴展到隨機刺激(註7)。這裡的隨機刺激可分為可預測和不可預測的。我們的實驗表明,只有當隨機刺激是可預測的,視網膜才能形成時間預測,這結果顯示視網膜可以從輸入信號中提取隱藏信息(可預測性)。
人工視網膜之困境
上面所討論的視網膜網路的智能屬性似乎純屬學術研究,但其實它對實際問題也有重要影響。視網膜動力學之研究與下一代相機和人工視網膜有著密切的關係。以人工視網膜來說,臨床上,有許多人由於視網膜退化而失明,通常,這些患者不再具有檢測光線的能力,但他們的視神經仍然完好無損。不難想像,通過向這些視神經輸入適當的突波,這些患者的視力是有可能恢復的。這個想法就是用一個人工視網膜,使傳入的光學刺激,能把對應的突波産生在視神經上。換句話說,我們只是用攝像機取代眼睛的信號檢測部分,然後通過某種生物兼容設備在視神經中產生突波。目前,以這種想法製造出來的人工視網膜(註8)已經存在,並且正在進行臨床試驗,這些人工視網膜真的能使病患再次看到光了!但病患的視覺體驗遠不及以前的正常體驗。這裡的主要困難是如何將光學圖像轉換成適當的突波發送到視神經中。這是一個神經編碼問題,我們還不清楚影像與突波間的對應關係。目前人工視網膜所使用的編碼極其簡單,被稱為速率編碼,在這個編碼方案中,突波產生的頻率正比於光強度。
視網膜編碼和機器學習
如上所述,人工視網膜所使用的速率編碼方案,並不能使患者恢復以前的正常視覺體驗。這意味著,這些人工視網膜所使用的編碼,無法與大腦正常溝通,以產生正常的視覺感知。由於視網膜的編碼仍然未知,最近已有研究,通過機器學習來訓練編碼器(註9),用以模仿生物視網膜的輸出。這個想法是:首先使用一些常用物體的圖像,來刺激生物視網膜和記錄這些物體所引起之突波。然後再以這些資料來訓練一個人工神經網路,目標就是重現這些物體所引發之突波。如果把訓練成功的人工神經網路,放置在光電探測器和尖峰生成電路之間以形成人工視網膜(圖一c),則該人工視網膜將能把這些物體所産生的突波正確的傳到視神經中。從某種意義上來說,它是取代了視網膜中由細胞組成的編碼網路。
結語
神經科學的基本目標之一是了解神經元用於交換信息的編碼。根據以上討論,人工視網膜將永遠不會提供患者正常的視覺感知,直到能正確的把刺激編碼。機器學習在一定程度上對靜態圖像的刺激有所幫助,但沒有跡象表明它可以應用在動態刺激上。這裡存在兩個主要困難:首先,不知道RGC會將哪些刺激的特徵發送到視神經,其次是如何將這些特徵編以突波來編碼。事實上,這兩個問題不僅與視網膜網絡有關。它們是一般神經科學的基礎問題。由於視網膜具有相對簡單的已知網絡結構和細胞類型,因此它可能是找到這兩個問題的答案的最佳地方。
参考文獻:
- Gollisch, T. and M. Meister (2010). “Eye Smarter than Scientists Believed: Neural Computations in Circuits of the Retina.” Neuron 65(2): 150-164.
- William Bialek et (1996), “Spikes”, MIT Press, ISBN: 9780262181747
- https://en.wikipedia.org/wiki/High-dynamic-range_imaging
- https://en.wikipedia.org/wiki/Flash_lag_illusion
- Berry, M. J., et al. (1999). “Anticipation of moving stimuli by the retina.” Nature 398(6725): 334-338.
- Schwartz, G., et al. (2007). “Detection and prediction of periodic patterns by the retina.” Nature Neuroscience 10(5): 552-554.
- Chan, C. K., et al. (2017). “Characterization of Predictive Behavior of a Retina by Mutual Information.” Frontiers in Computational Neuroscience 11.
- Weiland, J. D. and M. S. Humayun (2014). “Retinal Prosthesis.” IEEE Transactions on Biomedical Engineering 61(5): 1412-1424.
- Nirenberg, S. and C. Pandarinath (2012). “Retinal prosthetic strategy with the capacity to restore normal vision.” Proceedings of the National Academy of Sciences of the United States of America 109(37): 15012-15017 and McIntosh, L. et al (2016) https://papers.nips.cc/paper/6388-deep-learning-models-of-the-retinal-response-to-natural-scenes